|
 |
ラズベリーパイに DACS-USB製品を接続
[ . 1 . 2 . 3 . 4 . ] |
このページではpython言語でダイレクト版ドライバを用いた動作について解説しています。
対応しているDACS-USB製品 DACS-2500(K/KB)シリーズ、計測ユニット15BXP/15BXWシリーズ
■ ダイレクト版ドライバで動作させるには
ラズベリーパイの推奨OSとなっている Raspbian には、ダイレクト版ドライバが組込まれていませんので、
FTDI社のホームページよりドライバをダウンロードしインストールする必要があります。
すでに、ページ2のC言語での動作解説で、ドライバをインストールしている場合は、再インストールの必要はありませんので、
下記のドライバインストール手順の部分は読みとばしてください。
また、当社の 商品番号 RPi-4B2G をご使用の場合も、ドライバのインストールは不要です。
■ ダイレクト版ドライバのダウンロード
FTDI社のホームページよりデバイスドライバをダウンロードし解凍します。
http://www.ftdichip.com/Drivers/D2XX.htm
OSはLinux、Processor Architectureは ARM です。
複数のドライバのうち、
Raspberry Pi 4 モデルB では、 1.4.27 ARMv7 hard-float
Raspberry Pi 5 32bit OS Bookworm では、 1.4.27 ARMv7 hard-float
Raspberry Pi 5 64bit OS Bookworm では、 1.4.27 ARMv8 hard-float を選択します。
(注) 2024年4月現在の情報です。
■ ダイレクト版ドライバのインストール
(1) ディレクトリ Pi(注) の直下に、たとえば test2 というディレクトリを作成します。
(注) ディレクトリ Pi は、Raspberry Pi の初期起動時に登録したユーザ名です。
登録名に置き換えて読んで下さい。
(2) ダウンロードし解凍した releaseディレクトリ内にあるファイルすべてをディレクトリ test2 にコピーします。
releaseディレクトリごとコピーするのではなく、releaseディレクトリ内にあるファイルが対象です。
解凍したファイルのうち examples は必要ありません。
ここまでの処理(1)~(2)はデスクトップ画面のマウス操作で行うことができます。
(3) デスクトップ画面左上の  をクリックし、ターミナルを開きます。 をクリックし、ターミナルを開きます。
下記(4)~(10)のコマンドをキー入力して実行します。
(注) このレポートは 2023年4月に作成しています。
ドライバのバージョンが異なる場合は、ダウンロードしたファイルの ReadMe.txt をご覧ください。
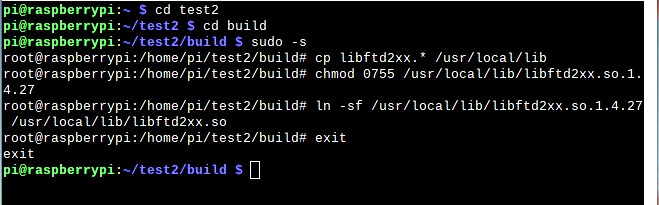
(4) cd␣test2
先に作成したコピー先のディレクトリに移動します。
(5) cd␣build
buildディレクトリに移動します。
(6) sudo␣-s
rootユーザーとします。
(7) cp␣libftd2xx.*␣/usr/local/lib
ライブラリをコピーします。
(8) chmod␣0755␣/usr/local/lib/libftd2xx.so.1.4.27
アクセス権限を変更します。
(9)ln␣-sf␣/usr/local/lib/libftd2xx.so.1.4.27␣/usr/local/lib/libftd2xx.so
リンクを作成します。
(10) exit
もとのユーザに戻します。
(11) ターミナルを閉じます。
■ サンプルプログラムを動作させてみます
(1) 下記のプログラムをダウンロードし、解凍してください。
python言語 ダイレクト版サンプルプログラムダウンロード
当社の 商品番号 RPi-4B2G にはサンプルプログラムをコピー済みです。
DACS-2500(K/KB)に対応しています。
AD変換用は計測ユニット 15BXP/15BXW に対応
DACS-2600用のサンプルを追加(2024年4月)
(2) ダウンロードした下記プログラムを ディレクトリ test2 にコピーします。
2024年3月 操作方法を改良
FT_rpi.py コマンド送受信用関数群 (d15xxx_rpi.pyサンプルで必須)
d15dio_rpi.py 基本的なコマンド送信とレスポンス受信
d15cnt_rpi.py カウンタ用サンプル
d15rcp_rpi.py PWMパルス出力用サンプル
d15pmv_rpi.py モーションコントローラ用サンプル
2024年3月 追加
d15adc_rpi.py 計測ユニット用AD変換サンプル
2024年4月 追加
d26dio_rpi.py DACS-2600サンプル
FT26_rpi.py DACS-2600 送受信用関数 (d26dio_rpi.pyサンプルで必須)
2024年5月 追加
d15rsv_rpi.py PWMパルス出力用 速度補間制御サンプル DACS-2500KB-RSV3専用
d15rsw_rpi.py PWMパルス出力用 速度補間制御サンプル DACS-2500KB-RSW4専用
ここまでの処理(1)~(2)はデスクトップ画面のマウス操作で行うことができます。
(3) ターミナルを開きます。
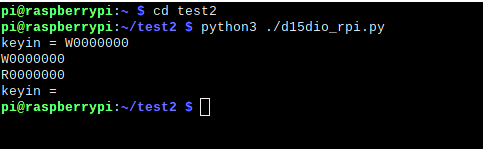
(4) cd␣test2 とキー入力して、test2 ディレクトリに移動します。
(5) 例えば、基本的なコマンド送信とレスポンス受信を実行する場合
python3␣./d15dio_rpi.py とキー入力してサンプルプログラムを実行します。
python3 の部分は、pythonのバージョンによって異なることがあります。
(6) keyin = と表示がありますので、たとえば W0000000(enter) とキー入力すると
R0000000 といった応答が返ってきます。
(7) enterキーのみを入力するとプログラムが終了します。
(8) カウンタ用、PWMパルス出力用、モーションコントローラ用、AD変換用など、その他のサンプルの動作、操作方法については、
各サンプルプログラムに詳細な注釈(和文)を記述していますので、そちらを参照してください。
(注1) カウンタ、PWMパルス出力、モーションコントローラ、AD変換用のサンプルでは、
各ボードの状態表示とキー入力処理の並行動作のため、キー入力検知用に、evdev モジュールを使用しています。
evdev モジュールを登録するには、ネットに接続した状態にて、ターミナルで、pip3 install evdev と入力するか、
この操作でエラー表示となる場合は、sudo apt install python3-evdev と入力してください。
(注2) キーボードデバイスのデバイス番号を event0 から、event1、event5 などに変更する必要が生じる場合があります。
サンプルプログラムを起動後、キー入力操作に移行しない場合は、デバイス番号を変更してみてください。
モーションコントローラ用サンプルプログラムの例
(9) 仮想COM版ドライバの一時削除について
Raspbian では、デフォルトにて仮想COMドライバが動作しています。
仮想COMドライバが動作しているとダイレクト版は動作しませんので、
サンプルプログラムでは、デバイスをOPENする前に仮想COMドライバを削除し、
プログラム終了時には元に戻しています。
前のページへ
|
このページに直接こられた方は、こちらをクリックして、
ダックス技研株式会社 計測制御用電子機器のHOMEに移動してください。
USB接続のDIO、計測ユニットなどDACS製品を掲載しています。 |
|  ページ4 python言語 / ダイレクト版ドライバで、DACSのUSBデバイスを動作させるサンプルプログラム
ページ4 python言語 / ダイレクト版ドライバで、DACSのUSBデバイスを動作させるサンプルプログラム